





















SKU/Artículo: AMZ-B0FXMD9MNB
Yahboom
Yahboom IMU Sensor Module 10-axis,High Precision Attitude Sensor Accelerometer,Magnetometer, Barometer. 100Hz Output,for STM32,Raspberry Pi,Jetson Altitude-Controlled Flight,3D Navigation
Color:
10-Axis
Detalles del producto
Disponibilidad:
En stock
En stock
Peso con empaque:
0.63 kg
0.63 kg
Devolución:
No
No
Condición
Nuevo
Nuevo
Producto de:
Amazon
Amazon
Viaja desde
USA
USA
Sobre este producto
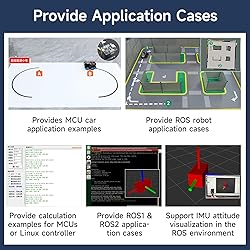
- Cost-effective IMU attitude sensors designed for embedded development and robotics. The Yahboom IMU module redefines attitude sensing solutions with its exceptional value. Available in six-, nine-, and ten-axis configurations, it flexibly covers a wide range of scenarios, from basic balance control to omnidirectional navigation. Focusing on core attitude output, it provides stable and reliable motion sensing for drones, robots, smart cars, and IoT devices. Precise attitude monitoring: The nine- and ten-axis versions integrate magnetometer data and use an AHRS algorithm to output pitch, roll, and yaw angles in real time, ensuring data stability even at high speeds. The six-axis version is equally accurate in static and low-speed scenarios, meeting the needs of cost-sensitive projects like two-wheeled balancing vehicles. High-speed response and strong compatibility: A 100Hz adjustable output frequency ensures real-time dynamic control. Dual communication interfaces (serial TTL and I2C) are compatible with mainstream platforms such as the STM32, Raspberry Pi, Jetson, and ESP32. Full ROS1/ROS2 function packages and open-source examples are provided for seamless integration into existing development environments. Industrial-grade hardware configuration: The ICM20948 six-axis chip ensures basic motion sensing, while a high-range magnetometer (8 gauss) and barometer (300-2000hPa) handle complex environments. The GD32 microcontroller independently runs filtering and resolution algorithms, and features a wide 3.3V/5V input voltage range. Gold stamp holes support PCB surface mount integration. Out-of-the-box experience: The module comes pre-loaded with firmware, eliminating the need for users to interact with underlying algorithms. A Type-C data cable and pin header are included, along with various car chassis and ROS navigation examples for rapid verification and deployment.
U$S 62,45
60% OFF
U$S 24,98
IMPORTÁ FACIL
Comprando este producto podrás descontar el IVA con tu número de RUT
U$S 62,45
60% OFF
U$S 24,98
con envío
Conoce más detalles
【Flexible Options】Available in 3 configurations: 6-axis (acceleration + angular velocity), 9-axis (with an additional magnetometer), and 10-axis (with an additional barometer), meeting the needs of diverse scenarios such as balancing vehicles, drones, and robots, precisely adapting to developers' budgets and functional requirements. Note: The pin headers are not soldered; user operation is required. 【High-Precision Attitude Data】Utilizing proprietary Mahony filtering algorithms and AHRS fusion technology, the nine-axis and ten-axis sensors output stable pitch, roll, and yaw angles, eliminating drift in dynamic environments and ensuring more precise control of drones, gimbals, and other devices. 【100Hz High-Frequency Communication & Strong Compatibility】Supporting an adjustable output frequency of 10-100Hz for fast response, the system provides dual serial (TTL) and I2C communication interfaces, compatible with mainstream controllers such as the STM32, RPi, Jetson, ESP32, and Arduino. Includes ROS1/ROS2 function packages and multi-platform examples. 【Industrial-Grade Hardware Design】The core chip utilizes the ICM20948 (6-axis) and a high-range magnetometer (8 gauss)/barometer (300-2000hPa). The 32-bit GD32 MCU independently processes the calculations, supports a wide voltage range of 3.3V/5V, and features gold-plated stamp holes for surface mount integration, ensuring ruggedness and durability. 【Ready-to-use & Comprehensive Resources】Includes the module, Type-C data cable, and pin headers. It also provides practical examples for the National Racing Car and ROS map navigation. Built-in firmware packaging algorithms eliminate the need for secondary development, significantly lowering the barrier to entry for embedded, microcontroller, and robotics development.
Compra protegida
Disfruta de una experiencia de compra segura y confiable
![]() Garantía de entrega
Garantía de entrega
Con Tiendamia todas tus compras cuentan con Garantía de Entrega o devolución total de tu dinero.
Compras 100% seguras y garantizadas, para que pidas lo que soñás y lo recibas del mundo a tu puerta.
Saber más.
Tarjetas prepagas, debito, y credito
Paga hasta en 12 cuotas sin interés con tarjetas de crédito.
Visa
Mastercard
American Express
Dinners
Discover
Lider
Midinero
OCA
OCA Blue
Tarjeta PREX
Pagos a través de PayPal
Paga en dólares con Tarjetas internacionales a través de PayPal.
PayPal

